

Introduction
UAV要想实现自主路径规划、动态避障、集群控制,路径规划算法是很重要,路径规划算法主要包括一下几个方面路径发现与地图构建、路径避障与优化、运动学规划。
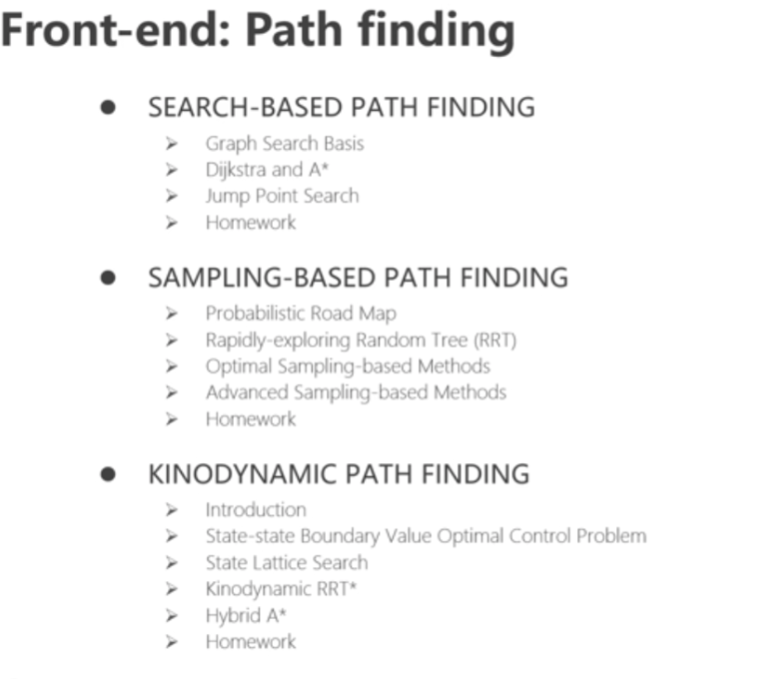
Path Finding
- Search-based path finding
- Graph search basis
- Dijkstra and A*
- Jump Point Search(混合A*,A*进阶)
- Sampling-based path finding
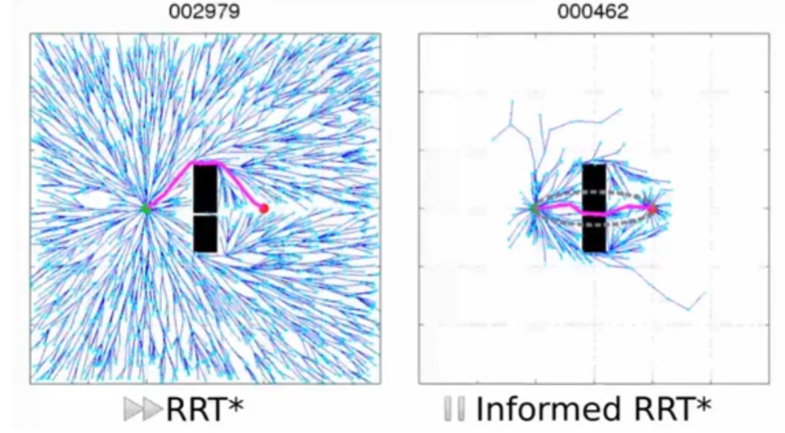
- RRT
- RRT* 随机采样(类似于蒙特卡洛?)
- informed RRT 启发式RRT
Hybrid A*是自动驾驶领域用的比较多的算法。
硬约束(一定满足的条件)与软约束
Minimun snap
MDP & MPC
待完善
评论区